
Exemple d’un équipement complet avec Axilum Robotics TMS-Robot
Axilum Robotics TMS-Robot est le premier robot développé spécifiquement pour assister les professionnels de santé et les chercheurs dans le positionnement d’une bobine de Stimulation Magnétique Transcranienne. Il intègre un bras robotisé avec 7 degrés de liberté ainsi qu’un fauteuil contrôlé par ordinateur, ajoutant 2 degrés de liberté.
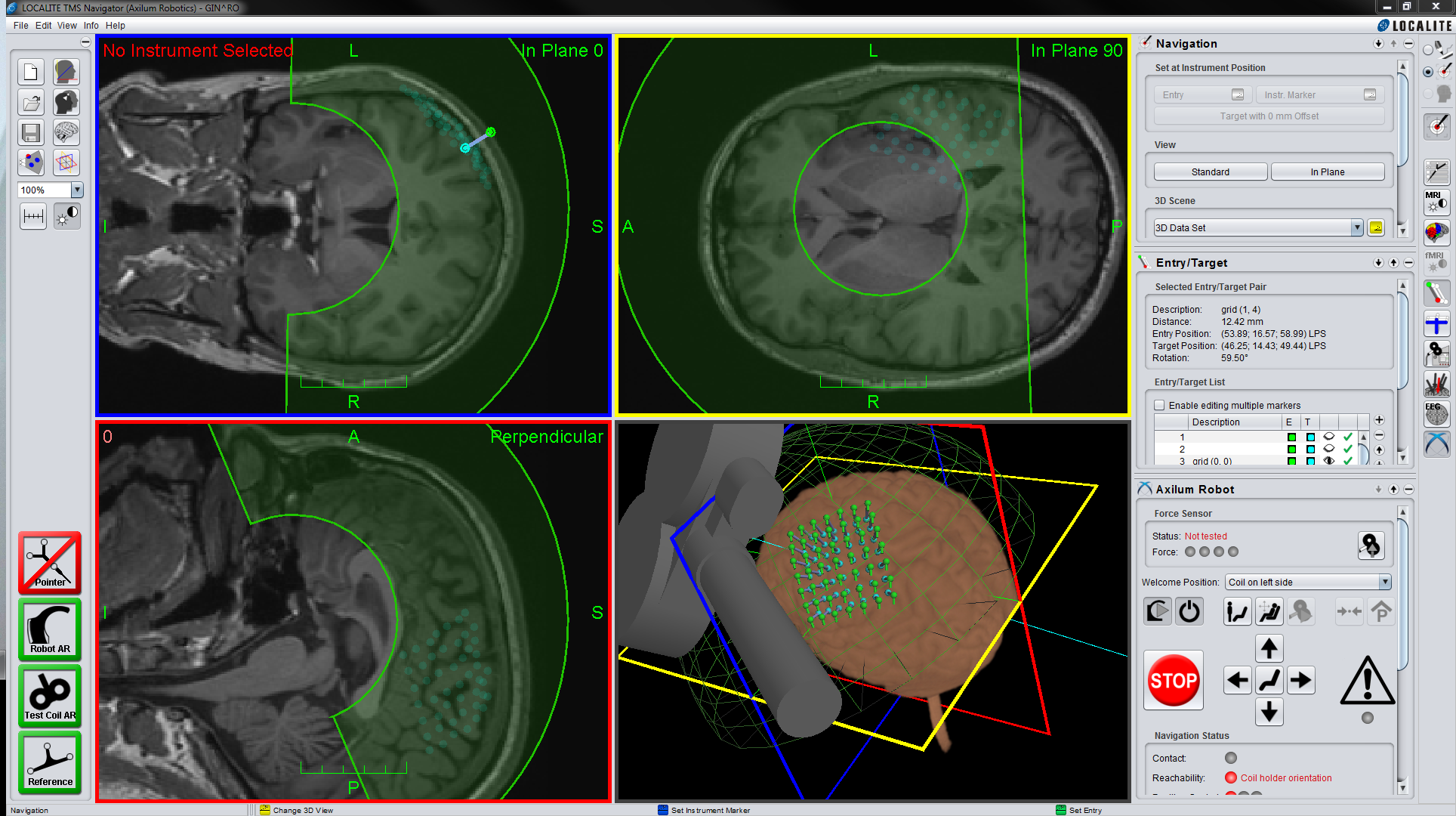
Axilum Robotics TMS-Robot, associé à un système de neuronavigation compatible ainsi qu’à une bobine de stimulation compatible connectée à son stimulateur, permet l’exécution automatique d’une séance de TMS guidée par l’image et planifiée à l’avance : une fois les cibles de stimulation et les paramètres de positionnement et d’orientation de la bobine définies au moyen du système de neuronavigation, TMS-Robot positionne la bobine tangentiellement au-dessus de ces cibles, en assurant un contact permanent avec la tête. TMS-Robot compense les mouvements éventuels de la tête durant la séance, tout en conservant la position de la bobine et son orientation par rapport au cerveau.
Principales caractéristiques de TMS-Robot
Large espace de travail
L’architecture innovante et brevetée du bras robotisé permet le positionnement du centre de la bobine selon un hémisphère. Cette architecture permet d’accéder à toutes les aires de stimulation lorsque la tête est positionnée au centre de l’hémisphère. Le fauteuil contrôlé par ordinateur permet d’ajuster le positionnement de la tête du patient dans l’espace de travail du robot.
Précision et répétabilité
Axilum Robotics TMS-Robot permet d’accroître la précision et la répétabilité de la procédure de TMS. Le bras robotisé et le fauteuil intègrent 9 capteurs de position de haute précision qui permettent de mesurer et de répéter tout positionnement de la bobine de stimulation par rapport au cerveau.
Contrôle de l’orientation de la bobine
L’architecture hémisphérique du bras robotisé permet :
Ceci permet de contrôler avec précision le point d’application de la stimulation par rapport aux structures cérébrales à stimuler. |
 Cliquer sur l’image pour l’agrandir Cliquer sur l’image pour l’agrandir |
Compensation des mouvements de la tête
Le système de neuronavigation, via son système de suivi optique 3D, assure le suivi en temps réel de la position et de l’orientation de la bobine de stimulation au cours de la séance de TMS afin de compenser les mouvements éventuels de la tête.
Détection et contrôle du contact
Un capteur d’effort fin et insensible au champ magnétique est fixé sur la face de la bobine en contact avec la tête afin de mesurer la force du contact entre la bobine et la tête. Le logiciel embarqué du robot contrôle la force appliquée en temps réel afin que celle-ci ne dépasse pas le propre poids de la bobine. Cette caractéristique permet de ne délivrer la stimulation que lorsque la bobine est au contact de la tête.
Sécurité
La tête du patient est placée au centre de l’hémisphère de travail du robot au moyen d’un fauteuil contrôlé par ordinateur. Chaque articulation du bras robotisé est équipée d’un mécanisme limitant leur amplitude de mouvement. Grâce à l’architecture hémisphérique du bras robotisé, la bobine de stimulation ne peut pas se déplacer selon une ligne droite d’un côté à l’autre de la tête. Cela prévient le risque pour la bobine de heurter la tête du patient au cours de son positionnement. De plus, le logiciel de contrôle du robot limite en temps réel la force appliquée par la bobine sur la tête pour une séance sûre et confortable.
Ergonomie
 Cliquer sur l’image pour l’agrandir Cliquer sur l’image pour l’agrandir |
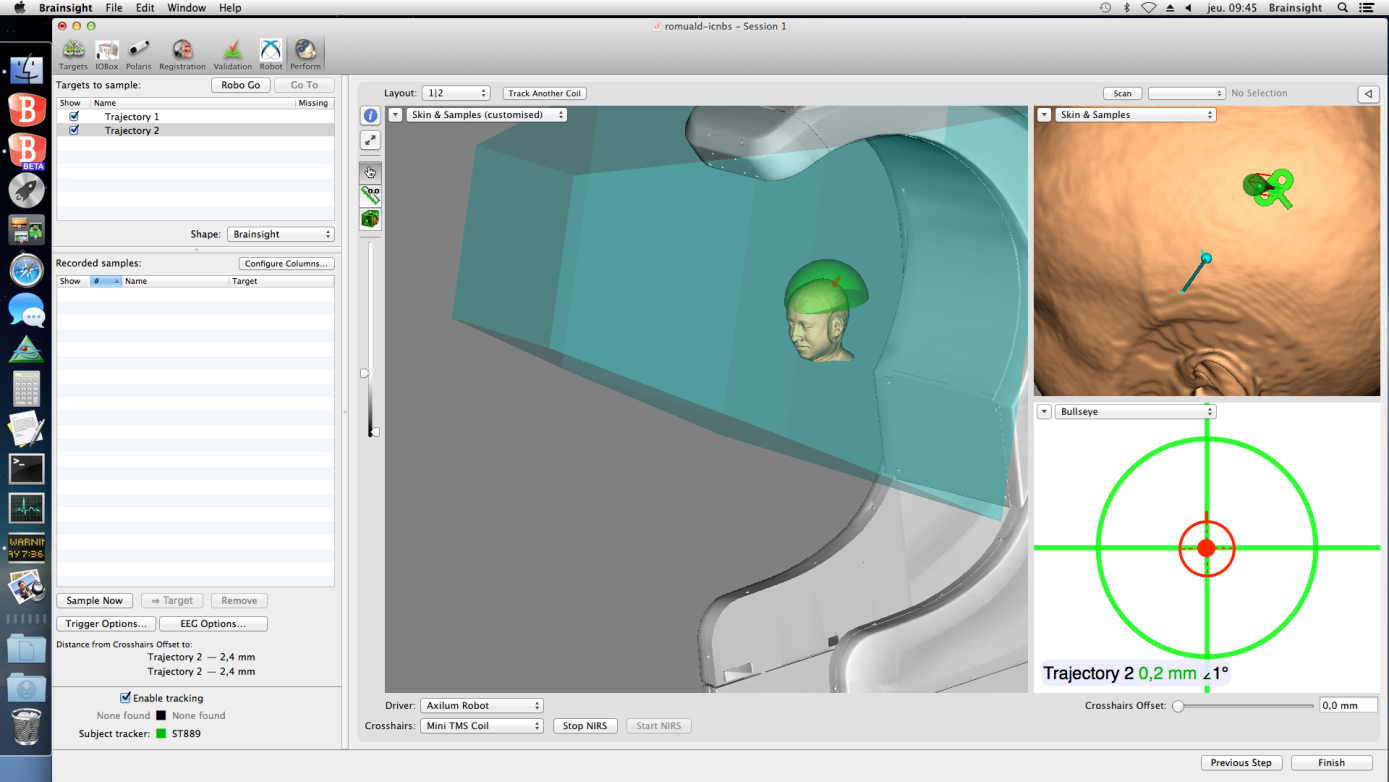
Axilum Robotics TMS-Robot n’ajoute pas une interface utilisateur supplémentaire. L’opérateur peut contrôler le robot et définir les mouvements et positions de la bobine de stimulation depuis l’interface-utilisateur graphique d’un système de neuronavigation compatible. |
Dimensions et poids
Axilum Robotics TMS-Robot peut s’installer dans de petites salles et il peut entrer dans la plupart des ascenseurs.
- Hauteur minimale : 1950 mm
- Dimensions à la base : 1523 x 769 mm
- Poids : 400 kg
Ressources additionnelles
Vous pouvez bénéficier d’informations complémentaires au moyen des ressources ci-dessous.
Prenez connaissance des 3 étapes pour la mise en œuvre d’une séance de TMS avec Axilum Robotics TMS-Robot.
Vérifiez la compatibilité entre Axilum Robotics TMS-Robot, les systèmes de neuronavigation, les stimulateurs de TMS et leurs bobines, et les dispositifs de mesure EEG.
Prenez connaissance des informations réglementaires sur Axilum Robotics TMS-Robot en fonction de votre pays d’origine.
 |
Consultez les principales publications à propos d’Axilum Robotics TMS-Robot. |
| |
Demandez notre brochure de présentation d’Axilum Robotics TMS-Robot (disponible en anglais uniquement). |
| Regardez des vidéos de démonstration d’Axilum Robotics TMS-Robot. |
Informations non contractuelles. Toutes les spécifications sont susceptibles de changement sans information préalable.