Once the stimulation targets and coil self-rotation have been defined in the neuronavigation system, Axilum Robotics TMS-Robot positions the coil tangentially at these targets, ensures contact between coil and head, and compensates for any head movement during the session, keeping the coil position and orientation with respect to the brain. TMS-Robot will allow to considerably improve the spatial resolution of the TMS stimulation in healthy subjects and in patients with neurological or psychiatric disorders.
In a study published in 2013 [Ginhoux et al, 2013] comparing navigated, robotic coil positioning with TMS-Robot versus manual coil positioning for motor cortex mapping using healthy volunteers, absolute and test-retest reliability were significantly improved by robotic assistance (p < 0.01 for all tests) by a factor of 2 (~3 mm vs. ~6 mm). Of special interest was the number of stimulations that were below 5 mm from the target. Whereas this rate was as low as 50% under manual conditions, it increased to 90% with the robot-controlled coil placement.
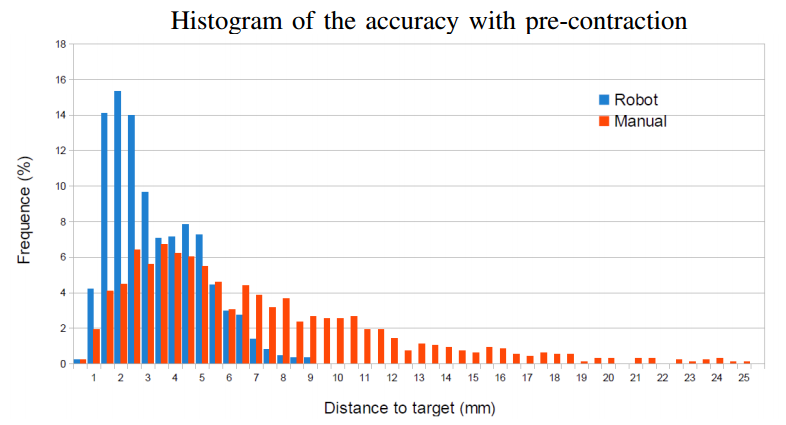
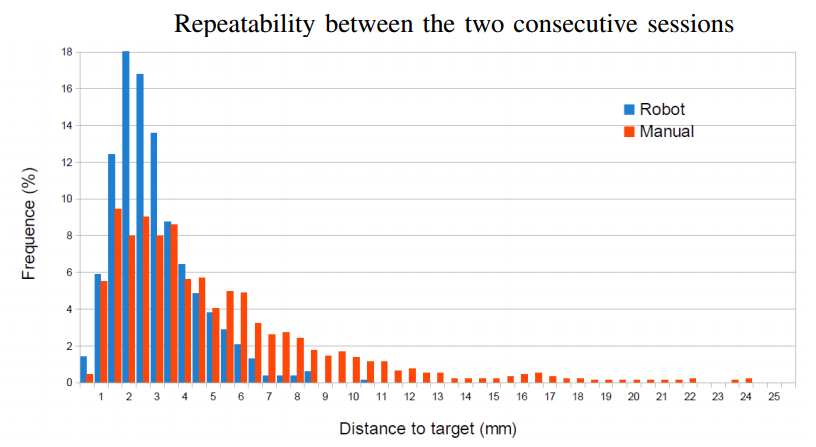
Absolute reliability (left) and test-retest reliability (right) comparing manual versus robotic coil positioning [Ginhoux et al, 2013].
These findings have been confirmed in another study of 2022 [Dormegny-Jeanjean et al, 2022]:
Reproducibility of coil placement and orientation : The robot enabled a more reproducible coil positioning between Active-MEP and Passive-MEP sessions:
• The average median distance was δ-PosROB = 2.5 ± 0.6 mm vs. δ-PosMAN = 4.2 ± 1.9 mm (p = 0.02).
• The difference was even more pronounced in terms of coil orientation: δ-OriROB = 1 ± 0.5 deg vs. δ-OriMAN = 17 ± 5 deg (p < 0.001).
Test -retest reliability : The distance between the A-MEP and P-MEP peak positions was significantly smaller when using robotic vs manual positioning: δdROB = 7.7 ± 8 mm vs. δdMAN = 19 ± 7 mm (p = 0.001).
For more information, please check out the publications:
- R. Ginhoux, P. Renaud, L. Zorn, L. Goffin, B. Bayle, J. Foucher, J.P. Armspach and M. de Mathelin, A Custom Robot for Transcranial Magnetic Stimulation: First Assessment on Healthy Subjects, Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC’13), Osaka, Japan, July 3-7, 2013. [Download].
- Ludovic C. Dormegny-Jeanjean, Lionel Landré, Clément de Crespin de Billy, Olivier Mainberger, Alexandre Obrecht, Benoit Schorr, Camille Pierrat, Golda Gommel, Maciej Bednarczyk, Bernard Bayle, Fabrice Berna, Jack R. Foucher, 3D-mapping of TMS effects with automatic robotic placement improved reliability and the risk of spurious correlation, Journal of Neuroscience Methods, Volume 381, 2022. [View]