Une fois que les cibles de stimulation et la rotation propre de la bobine ont été définies dans le système de neuro-navigation, Axilum Robotics TMS-Robot positionne la bobine tangentiellement sur les cibles, s’assure d’un bon contact entre la bobine et la tête, et compense tout mouvement éventuel de la tête pendant la séance, pour maintenir en permanence la position et l’orientation de la bobine par rapport au cerveau. TMS-Robot permettra d’améliorer considérablement la résolution spatiale de la stimulation magnétique transcrânienne sur des sujets sains et des patients avec des troubles neurologiques ou psychiatriques.
Dans une étude publiée en 2013 [Ginhoux et al, 2013] comparant le positionnement neuronavigué et robotisé d’une bobine avec TMS-Robot, au positionnement manuel pour la cartographie du cortex moteur sur des sujets sains, la précision et la répétabilité ont été améliorées significativement par l’assistance robotique (p < 0.01 pour les deux mesures) d’un facteur 2 (~3 mm contre ~6 mm). D’un intérêt particulier était le nombre de stimulations qui ont été délivrées à moins de 5 mm de la cible. Alors que le taux était aussi faible que 50% dans les conditions manuelles, il a augmenté à 90% avec le placement contrôlé par le robot.
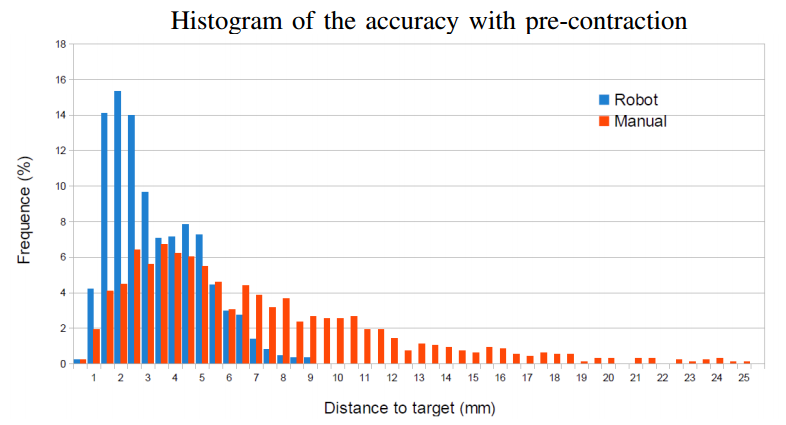
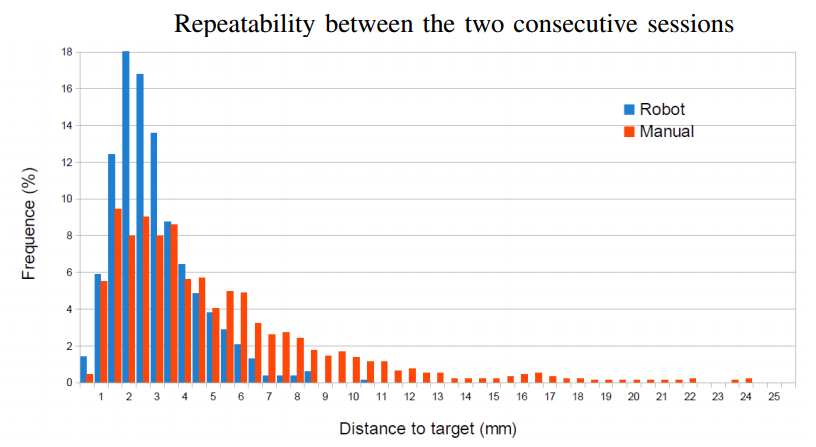
Précision (à gauche) et répétabilité (à droite) comparées du positionnement manuel ou robotisé de la bobine [Ginhoux et al, 2013].
Ces améliorations ont été confirmées dans une autre étude publiée en 2022 [Dormegny-Jeanjean et al, 2022], toujours dans le cadre d’une cartographie du cortex :
Reproductibilité du placement et de l’orientation de la bobine : Le robot permet un positionnement plus reproductible entre les sessions de mesure de PEM Actif et PEM Passif:
• Distance moyenne mediale δ-PosROB = 2.5 ± 0.6 mm vs. δ-PosMAN = 4.2 ± 1.9 mm (p = 0.02).
• La différence était plus prononcée encore pour l’orientation de la bobine: δ-OriROB = 1 ± 0.5 deg vs. δ-OriMAN = 17 ± 5 deg (p < 0.001).
Fiabilité test-retest : La distance entre les positions du PEM Actif et PEM Passif était significativement réduite en utilisant le robot par rapport au positionnement manuel: δdROB = 7.7 ± 8 mm vs. δdMAN = 19 ± 7 mm (p = 0.001).
Pour plus d’information, consulter les publications:
- R. Ginhoux, P. Renaud, L. Zorn, L. Goffin, B. Bayle, J. Foucher, J.P. Armspach et M. de Mathelin, A Custom Robot for Transcranial Magnetic Stimulation: First Assessment on Healthy Subjects, Actes de la 35ème conférence annuelle internationale de la société IEEE d’ingénierie en médecine et biologie (EMBC’13), Osaka, Japon, 3-7 juillet 2013. [Télécharger] (Version anglaise uniquement).
- Ludovic C. Dormegny-Jeanjean, Lionel Landré, Clément de Crespin de Billy, Olivier Mainberger, Alexandre Obrecht, Benoit Schorr, Camille Pierrat, Golda Gommel, Maciej Bednarczyk, Bernard Bayle, Fabrice Berna, Jack R. Foucher, 3D-mapping of TMS effects with automatic robotic placement improved reliability and the risk of spurious correlation, Journal of Neuroscience Methods, Volume 381, 2022. [Voir] (version anglaise seulement)